Geometries of Surfaces
Last time we've seen a topological classification of all closed
surfaces as connected sums of tori or connected sums of projective
planes. Now let's shift our attention to the different geometries
surfaces can have. You will probably be surprised to find out that
there are only three different types of surface geometries where each
point looks exactly the same as any other. These three are spherical
geometry, which we've encountered on the sphere and projective plane;
planar or flat geometry, which we've seen on the torus and Klein bottle;
and finally hyperbolic geometry, the most important and mysterious of
the three, and one which we haven't encountered yet.
Too Much Angle!
.png)
Before we plunge into the depths of hyperbolic geometry, I want to
emphasize the criteria of homogeneity—of having the same geometry
around every point. Consider the closed surface on the right. It
inherits a geometry from three dimensional Euclidean space it's in.
Your avatar the cyclops, by observing the surrounding and possibly a
walking friend can
easily tell between different points on the surface. The view of at
point p, for instance is very different from point q. On the other
hand, all points on a torus or a Klein bottle or the sphere are exactly
the same to the cyclops (remember, there are no seams). Mathematicians
are most often interested in understanding precisely those geometries
that are everywhere the same.
Now back to the topic at hand. You may well ask which surfaces from
the ones we've classified last time have hyperbolic geometry. And the
answer is: all of the ones we haven't explicitly talked about.
That is, all the surfaces except the sphere, torus, Klein bottle, and
the projective plane have hyperbolic geometry. Let's try to understand
this starting with the double torus, which is just torus#torus.
Activity 1: Gluing octagons for fun and profit
.png)
- On the right you see an octagon with marked side identification.
When you glue respective sides, what surface do you get? (Hint:
carefully draw a series of pictures, gluing one pair of arrows at a
time.)
- What is the (inside) angle between two consecutive sides in a
regular octagon?
- Does this octagon tile the plane? Why not? (Hint:
use part 2.)
As you've seen in the preceding activity, an octagon has a large
angle surplus. All the vertices get glued to a single vertex
and so the total angle around that vertex becomes 8x135=1080 degrees,
while there are only 360 degrees around a point. Note that
this is the opposite of what we've seen happen in the sphere and the
projective plane, where we had an angle deficit. Let's
investigate this phenomenon further.
Activity 2: A triangle here, a triangle there
.png)
- What is the sum of the angles of a triangle in a plane? Can you
prove it? (Hint: see this helpful picture.)
- What is the minimum and maximum sum of the angles of a triangle on
the sphere with one vertex on the North pole and two on the
equator? (Hint: the sum depends on where the last two vertices are on
the equator.)
- Recall the square identification scheme for the
projective plane, illustrated on the right. Which vertices of the
square are identified?
That is, when you do the gluing, which vertices are glued together?
- What are the angle deficits of the resulting vertices? (Hint:
remember how this question was analyzed in case of the sphere.)
- Can you find a square on the sphere in which each of the four
angles measures 180 degrees? (Hint: think equator.)
- Let this square be the fundamental polygon for the projective plane.
Looks familiar?
Thus on a sphere triangles, and polygons in general, have larger
angle sums than on a plane. So if a fundamental polygon is too
angle-skinny, we can place this polygon on a sphere and increase its
angles so that they'll add up to 360 upon identification of the
appropriate vertices. This is the case for the projective plane, and of
course for the sphere
itself; in this case we say the surface has a spherical geometry.
The torus and Klein bottle have neither angle surpluses nor
deficits, since 4x90 is 360 on the nose. Thus both have Euclidean or
flat geometry.
On the other hand, the remaining infinite chain of surfaces we've
seen in the classification, like
the double torus in activity 1, have an angle surplus in their
fundamental polygons; they are too angle-fat. Thus we need to find a
surface in which polygons have smaller angle sums than in the
plane, so that when we transfer these fundamental polygons to it, they
will have smaller angles that will add up to 360 around each identified
vertex. This surface is called the hyperbolic plane and
correspondingly, the surfaces which have an angle surplus in their
fundamental polygons have a hyperbolic geometry.
The Hyperbolic Plane
It would not be an exaggeration to say that the hyperbolic plane is
one of the most important objects in modern geometry. It is, however,
not as easy to picture or describe as the spaces we've studied up to
now. One way to look at it is through the so called Poincaré
disk model. In it the hyperbolic plane is represented as the interior
of a disk in the plane in which distances get exponentially larger as
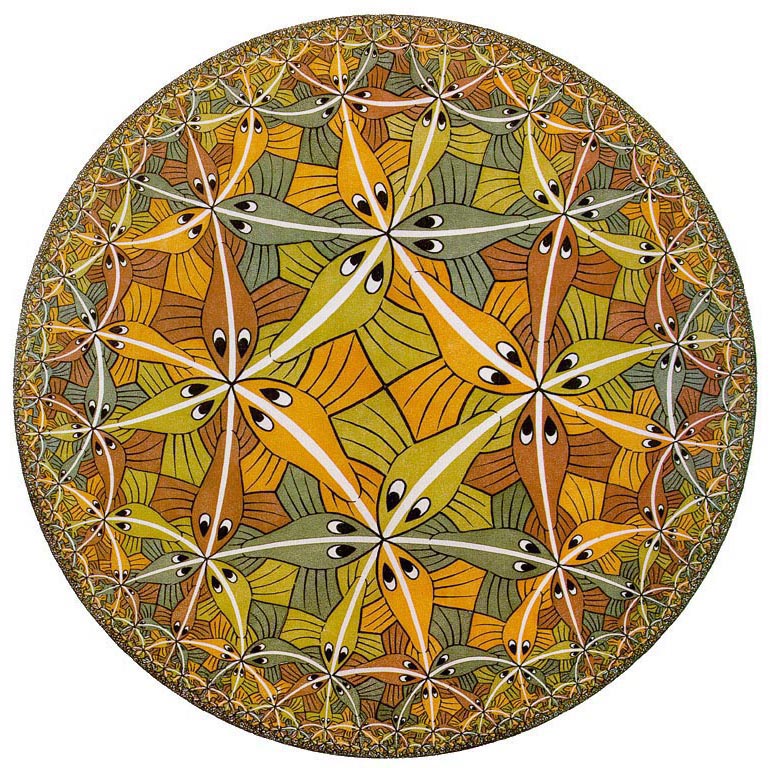
you approach the boundary of the disk. One of the easiest ways to see
this is by looking at the art of M.C. Escher, like
the woodcut Circle Limit III below. Note that while the fish appear
smaller the closer you get to the boundary of the disk, they are the
same size in the geometry of the hyperbolic plane. Similarly,
all the white segments going from the fishes' tails to their noses are
the same length.
Activity 3: Exponentially vast expanse
- Note that the white segments in Escher's woodcut form equilateral
triangles and squares. Can we tile the plane with equilateral triangles
and squares in such a manner? (Hint: if they were triangles and squares
in the plane, what would the angle sum around a vertex be?)
- While distances in the Poincaré disk are distorted, angles
are not. Assuming all angles between adjacent white segments in picture
are the same (which is not quite true, but almost!), what does each
measure?
- Lines which look straight to someone living in the hyperbolic plane
look like circle arcs which intersect the disk boundary at right angles
in the Poincaré model (see illustration below) and
diameter lines going through the center of the disk. Given
such a line L in the hyperbolic plane and a point p not on the line, how
many lines parallel to L go through that point? (Hint: in the normal
Euclidean plane the answer is 1; it's an axiom of Euclidean
geometry. Recall that two lines are parallel if they do not
intersect.)
.png)
Just like in the Euclidean plane and the sphere, polygons in the
hyperbolic space are composed of segments of hyperbolic
lines. One way to explore the hyperbolic plane is using a computer
program, like the Java application NonEuclid which can be found at http://www.cs.unm.edu/~joel/NonEuclid/NonEuclid.html.
Activity 4: Figures hyperbolic
- Use NonEuclid to investigate the angle sum of triangles in the
hyperbolic plane. From the measurement menu at the top select "Measure
triangle" and then highlight three vertices in the Poincaré disk.
If no vertices are drawn, select File->New and then draw vertices
using Constructions->Plot Points. Move these vertices around,
tracking the change in angle sum in the left panel. Is it ever greater
than 180 degrees? (Hint: if the software is working correctly, it
shouldn't be!)
- Draw a triangle in the center of the disk. What is its angle sum?
Make the triangle larger. And then larger still. How does the angle
sum change?
- Can you make the angle sum arbitrarily small? How?
- Check whether the Pythagorean
theorem holds in the hyperbolic plane.
(Use Constructions->Draw Perpendicular.)
- How about the angle
bisector theorem?
Here's the pictorial summary of how we go about giving the double
torus, as a side-identified octagon, a hyperbolic geometry.
.png)
Just like in the case of the torus or Klein bottle and the Euclidean
plane, we can tile the whole hyperbolic plane by reflecting this
fundamental octagon across each of its sides, then reflecting again, and
again, and again. What you get is a tiling similar to the one in the
Java applet below. You can use p to increment the number of sides
and P decrement it, while q and Q increment/decrement the number of
polygons adjacent to each vertex. Dragging with the mouse moves the
plane in the corresponding direction. The starting values, for the
octagonal tiling, are p=8 and q=8. For complete instructions go to the
author's, Don Hatch's page.
Note that all octagons you see are regular: all their sides are
equal in length in the hyperbolic geometry, and all their angles are 45
degrees.
Activity 5: All together now
- Examine the pattern of the fundamental polygon of the double torus.
What would the fundamental polygon of a torus#torus#torus be? (Hint: it
would have 4+4+4=12 sides.)
- Use the illustration below, showing how to get the double torus
fundamental polygon from two tori polygons, to show that your hunch in
part 1 is correct.
- What is the general pattern for an n-torus, the connected sum of n
tori?
- How about the projective plane? (Hint: use the same technique as for
the tori and note that this polygon is
equivalent to the one we've usually used for the Klein bottle.)
.png)
Next: The Euler Characteristic
.png){kind=link}
.png){kind=link}