updated version is published in
Mathematical Intelligencer, Vol. 23, No. 2, pp. 17-28, Spring 2001.
David W. Henderson
Department of Mathematics, Cornell University, Ithaca, NY, USA, dwh2@cornell.edu
Daina Taimiða
Department of Mathematics, Cornell University, dtaimina@math.cornell.edu
For God's sake, please give it up. Fear it no less than the sensual passion, because it, too, may take up all your time and deprive you of your health, peace of mind and happiness in life.
Wolfgang Bolyai urging his son János Bolyai to give up work on hyperbolic geometry.
In June of 1997, Daina was in a workshop watching the leader of the workshop, David, helping the participants study ideas of hyperbolic geometry using a paper and tape surface in much the same way that one can study ideas of spherical geometry by using the surface of a physical ball. David's hyperbolic plane was then so tattered and fragile that he was afraid to handle it much. Daina immediately began to think: "There must be some way to make a durable model." David made his first paper hyperbolic plane in the summer of 1978 while on canoe trip on the lakes of Maine using the scissors on his Swiss Army knife. He had just learned how to do the construction from William Thurston at a workshop at Bates College. This crude paper surface was used in the David's geometry classes and workshops (becoming more and more tattered) until 1986 when some high school teachers in a summer program that David was leading collaborated on a new larger paper and tape hyperbolic surface. This second paper and tape hyperbolic surface (used in classes and workshops for the next 11 years) was the one that Daina witnessed in use. Daina experimented with knitting (but the result was not rigid enough) and then settled on crocheting. She perfected her technique during the workshop and crocheted her first small hyperbolic plane and then while camping in the forests of Pennsylvania, she crocheted more and we started exploring its uses. In this paper we will share how to crochet a hyperbolic plane (and make related paper versions). We will share how we have used it to increase our own understanding of hyperbolic geometry. (Where does the formula pr2 fit in hyperbolic geometry?) We will finish by proving that, in fact, it is an isometric model of the hyperbolic plane.
But, Wait! you say. Do not many books state that it is impossible to isometrically embed the hyperbolic plane as a closed subset of the Euclidean 3-space? Yes, this is true: For a popularly written examples, see Robert Osserman's Poetry of the Universe [8], page 158, and David Hilbert and S. Cohn-Vossen's, Geometry and the Imagination [5], page 243. For a detailed discussion and proof, see Spivak's A Comprehensive Introduction to Differential Geometry [9], Vol. III, pages 373 and 381. All of the references are implicitly assuming surfaces embedded with some conditions of differentiability and refer (implicitly or explicity) to a 1901 theorem by David Hilbert. Hilbert proved [4] that there is no real analytic isometry, but his arguments work in class C4. Moreover, in 1955, N. Kuiper showed [6] that there is a C1 isometric embedding onto a closed subset of 3-space, and in 1972 Tilla Milnor proved [7] that a C2 isometric embedding was not possible. For a more discussion of these ideas see Thurston [10], pp51-52. We will show that the surfaces described here can be extended indefinitely and that the intrinsic geometry of these surfaces is hyperbolic geometry; and, they appear to not be C1 embedded.
Constructions of Hyperbolic Planes
We will describe three different isometric constructions of the hyperbolic plane (or approximations to the hyperbolic plane) as surfaces in 3-space. Then we will connect them with the standard upper half plane model which is a (non-isometric) model of the hyperbolic plane.
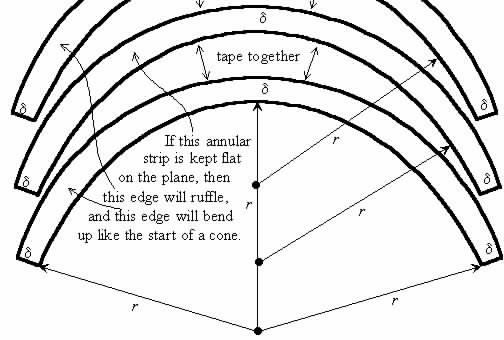
1. The Hyperbolic Plane From Paper Annuli
This is the paper and tape surface that David learned from William Thruston. It may be constructed as follows: Cut out many identical annular strips as in the following Figure 1. Attach the strips together by attaching the inner circle of one to the outer circle of the other or the straight ends together. The resulting surface is of course only an approximation of the desired surface. The actual hyperbolic plane is obtained by letting d ® 0 while holding r fixed. Note that since the surface is constructed the same everywhere (as d ® 0), it is homogeneous (i.e. intrinsically and geometrically, every point has a neighborhood that is isometric to a neighborhood of any other point). We will call the results of this construction the annular hyperbolic plane. You may want to try this by cutting out a few identical annular strips and taping them together as in Figure 1.
Figure 1. Annular strips for making an annular hyperbolic plane.
2. How to Crochet the Hyperbolic Plane
If you tried to make your annular hyperbolic plane from paper annuli you certainly realized that it takes a lot of time. Also, later you will have to play with it carefully because it is fragile and tears and creases easily -- you may want just to have it sitting on your desk. But there is another way to get a sturdy model of the hyperbolic plane which you can work and play with as much as you wish. This is the crocheted hyperbolic plane.
In order to make the crocheted hyperbolic plane you need just a very basic crocheting skills. All you need to know is how to make a chain (to start) and how to single crochet. That's it! Now you can start. See Figure 2 for a picture of these stitches, which will be described further in the next paragraph.
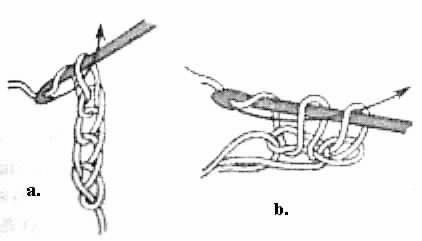
Figure 2. Crochet stitches for the hyperbolic plane.
First you should chose a yarn which will not stretch a lot. Every yarn will stretch a little but you need one which will keep its shape. Now you are ready to start the stitches:
Crocheting will take some time but later you can work with this model without worrying about destroying it. The completed product is pictured in Figure 3.

Figure 3. A crocheted annular hyperbolic plane.
3. Polyhedral Constructions.
A polyhedral model can be constructed from equilateral triangles by putting 7 triangles at every vertex. This is called the {3,7} polyhedral model, because triangles (3-gons) are put together 7 at a vertex. This model has the advantage of being constructable more easily than the models above; however, one can not make better and better approximations by decreasing the size of the triangles. This is true because at each vertex the cone angle is 420° no matter what the size of the triangles are; whereas the hyperbolic plane in the small looks like the Euclidean plane. Another disadvantage of the polyhedral model is that it is not easy to describe coordinates on it.
We can avoid some of the problems of the {3,7} model by putting 7 triangles together only at every other vertex and 6 triangles together at the others. The precise construction can be described in three different (but, in the end, equivalent) ways:
1. Construct polyhedral annuli as in Figure 4 and then tape them together as with the annular hyperbolic plane.
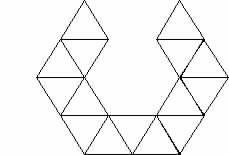
Figure 4. Polyhedral annulus.
2. You can construct two annuli at a time by using the shape in Figure 5 and taping one of them to the next by joining: a®A, b®B, c®C.
.
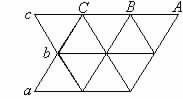
Figure 5. Shape to make two annuli.
3. The quickest way is to start with many strips as pictured in Figure 6a these strips can be as long as you wish. Then add four of the strips together as in Figure 6b using 5 additional triangles. Next, add another strip every place there is a vertex with 5 triangles and a gap (as at the marked vertices in Figure 6b). Every time a strip is added an additional vertex with 7 triangles is formed.
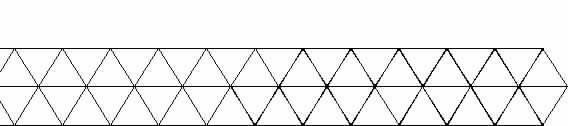
Figure 6a. Strips.
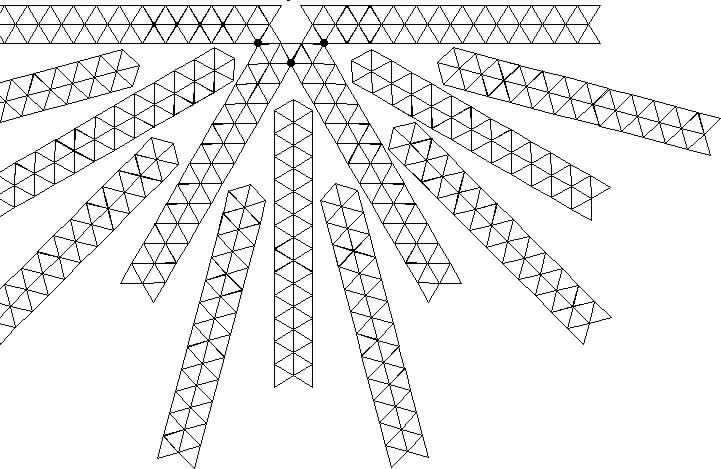
Figure 6b. Forming the polyhedral annular hyperbolic plane.
The center of each strip runs perpendicular to each annulus, and you can show that these curves (the center lines of the strip) are each geodesics because they have local reflection symmetry.
Hyperbolic Planes of Different Radii (Curvature)
Note that the construction of a hyperbolic plane is dependent on the r (the radius of the annuli) which can be called the radius of the hyperbolic plane. As in the case of spheres, we get different hyperbolic planes depending on the value of r. In Figures 7a,b,c there are crocheted hyperbolic planes with radii approximately 4 cm, 8 cm, and 16 cm. the pictures were all taken from approximately the same perspective and in each picture there is a centimeter rule in order to indicate the scale.
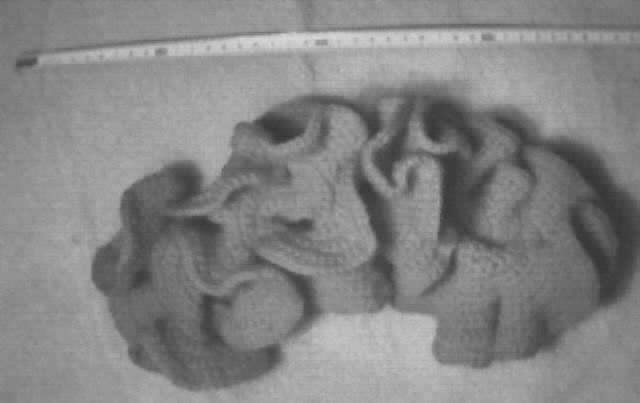
Figure 7a. Hyperbolic plane with r = ~4 cm.
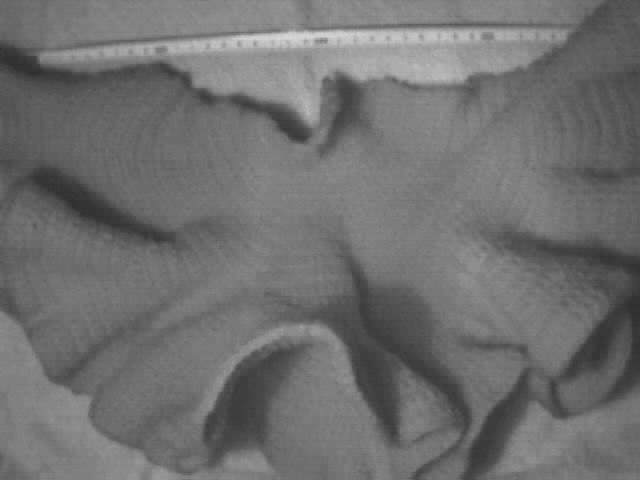
Figure 7b. Hyperbolic plane with r = ~8 cm.

Figure 7c. Hyperbolic plane with r = ~16 cm.
Note that as r increases the hyperbolic plane becomes flatter and flatter (has less and less curvature). For both the sphere and the hyperbolic plane as r goes to infinity they both become indistinguishable from the ordinary flat (Euclidean) plane. We will show below that the Gaussian Curvature of the hyperbolic plane is -1/r2. So it makes sense to call this r the radius of the hyperbolic plane in agreement with spheres where a sphere of radius r has Gaussian curvature 1/r2.
Intrinsic Geodesic Coordinates
Let r be the fixed inner radius of the annuli and let Hd be the approximation of the annular hyperbolic plane constructed, as above, from annuli of radius r and thickness d. On Hd pick the inner curve of any annulus and calling it the base curve, pick a positive direction on this curve, and pick any point on this curve and call it the origin O. We can now construct an (intrinsic) coordinate system xd: R2 ® Hd by defining xd(0,0) = O, xd(w,0) to be the point on the base curve at a distance w from O, and xd(w,s) to be the point at a distance s from xd(w,0) along the radial (along the radii of each annulus) curve through xd(w,0), where the positive direction is chosen to be in the direction from outer- to inner-curve of each annulus. See Figure 8. The reader can easily check that this coordinate map is one-to-one and onto.
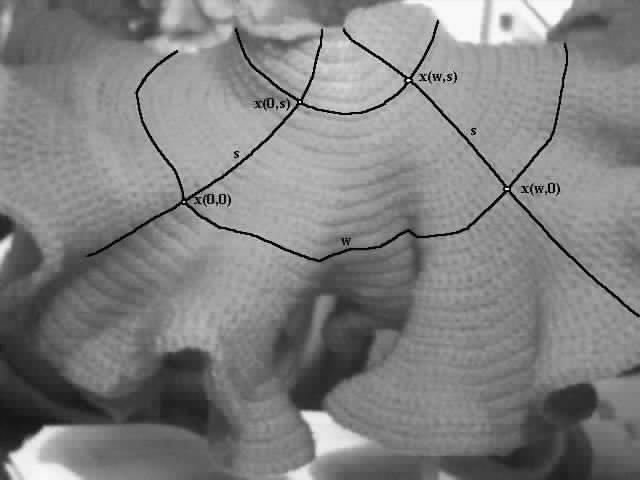
Figure 8. Geodesic rectangular coordinates on annular hyperbolic plane.
Note that each coordinate map xd induces a metric, dd, on R2 by defining dd(p,q) to be the (intrinsic) distance between xd(p) and xd(q) in Hd. Those readers who desire a more formal description of the limit can check that, in the limit as d®0, the metrics dd converge to a metric d on R2 and thus defines the annular hyperbolic plane as a metric space. In fact, this process also defines a Riemannian metric but this will be easier to see after we show the connections with the upper half plane model.
What Can We Determine About Hyperbolic Geodesics?
The following facts were observed by our students during one class period in which they explored for the first time the crocheted hyperbolic plane in small groups.
The radial curves are geodesics. The radial curves (curves that run radially across each annulus) have intrinsic reflection symmetry in each Hd because of the symmetry in each annulus and the fact that the radial curves intersect the bounding curves at right angles. These reflection symmetries carry over in the limit to the annular hyperbolic plane. Such bilateral symmetry is the basis of our intuitive notion of straightness (see Chapter 1 of [2] and [3] for more details) and thus we can conclude that these radial curves are geodesics (intrinsically straight curves) on the annular hyperbolic plane.
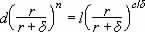
The radial geodesics are asymptotic. Looking at our hyperbolic surfaces we see the radial geodesics getting closer and closer in one direction and diverging in the other direction. In fact, let l and m be two of the radial geodesics in Hd. The distance between these radial geodesics changes by r/(r + d) every time they cross one annulus. (Remember the annuli all have the same radii. If we cross n strips, then the distance in Hd between l and m at a distance c = nd from the base curve is:
 .
.
Now take the limit as d ® 0 to show that the distance between l and m on the annular hyperbolic plane is:
 . (*)
. (*)
Asymptotic geodesics never happen on a Euclidean plane or on a sphere.
Other geodesics can be found in approximate intuitive ways.
Definition: Let y: A ® B be a map from one metric space to another, and let
 be a curve in A. Then, the distortion of y along l at the point p = l(0) is defined as:
be a curve in A. Then, the distortion of y along l at the point p = l(0) is defined as:
 .
.
We seek a change of coordinates which will distort distances equally in both directions. The reason for seeking this change is that if distances are distorted the same in both coordinate directions then the chart will preserves angles. (We call such a chart conformal.)
We can not hope to have no distortion in both coordinate directions (if there were no distortion then the chart would be an isometry); so we try to make the distortion in the 2nd coordinate direction the same as the distortion in the 1st coordinate direction. After a little experimentation we find that the desired change is
z(x,y) = x(x, r ln(y/r)),
with the domain of z being the upper half plane
R2+ º { (x,y) Î R2 | y > 0 },
where x is the geodesic rectangular coordinates defined above. This is the usual upper half plane model of the hyperbolic plane thought of as a map of the hyperbolic plane in the same way that we use planar maps of the spherical surface of the earth.
Lemma. The distortion of z along both coordinate curves
x ® z(x,b) and y ® z(a,y)
at the point z(a,b) is r/b.
Proof. We now focus on the point z(a,b) = x(a, r ln(b/r)). Along the first coordinate curve, x ® z(x,b) = x(x, r ln(b/r)), the arc length from x(a,c) to x(x,c) is |x-a| exp(-c/r) by (*) above. Thus, we can calculate the distortion:
 .
.
Now, look at the second coordinate curve, y ® z(a,y) = x(a, r ln(y/r)). Along this coordinate curve (a radial geodesic) the speed is not constant; but, since the second coordinate of x measures arc length, the arc length from z(a,y) = x(a, r ln(y/r)) to z(a,b) = x(a, r ln(b/r)) is
| r ln(y/r)) - r ln(b/r)) |
and the distortion is
 .
.
In the above situation we call these distortions, the distortion of the map z at the point p and denote it dist(z)(p). Thus,
dist(z)((a,b)) = r/b. (**)
Connection to the Pseudosphere
Take the annulus whose inner edge is the base curve and embed it isometrically in the x-y plane as a complete annulus with center at the origin. Now attach to this annulus portions of the other annuli as indicated in Figure 9. Note that the second and subsequent annuli form truncated cones.
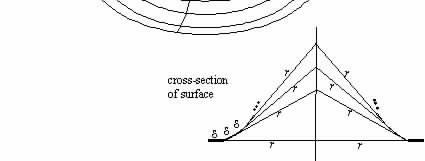
Figure 9. Hyperbolic surface of revolution.
Let the vertical axis be the z-axis and then at each z we have the following picture in Figure 10.
Figure 10. Relating R(z), r, Dz, and DR.
Thus
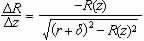 .
.
In the limit as d (and DR and Dz) go to zero we get
 .
.
We can get the same differential equation by using (*) above which implies that the circle at height z has circumference 2pre-s/r, where s is the arc length along the surface from (0,r) to (z,R(z)). We can solve this differential equation explicitly for z and obtain the solution:
 .
.
Here z is a continuously differentiable function of R and the derivative (for z ¹ 0) is never zero, hence R is also a continuously differentiable function of z. Since R is never zero, we can conclude that this hyperbolic surface of revolution is a smooth surface (traditionally called the pseudosphere). Thus,
Theorem 1. The pseudosphere is locally isometric to the annular hyperbolic plane.
Hyperbolic Isometries and Geodesics
We have seen that there are reflections in the annular hyperbolic plane about the radial geodesics, but we saw the existence other reflections and geodesics only approximately. However, we were able to see that non-radial geodesics appear to be tangent to one annulus and then in both directions from that point to approach being perpendicular to the annuli. To assist us in looking at transformations of the annular hyperbolic space we use the upper half plane model. Since the annuli corresponds to horizontal lines in the upper half plane model, geodesics should then be curves which start and end perpendicular to the boundary x-axis. Semicircles with centers on the x-axis are such curves, and we can show directly that they are geodesics with bilateral symmetry. In particular, we can show that directly that inversion in a semicircle corresponds to a reflection isometry in the annular hyperbolic plane.
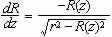
Definition: An inversion with respect to a circle G is a transformation from the extended plane (the plane with ¥, the point at infinity, added) to itself that takes C, the center of the circle, to ¥ and vice versa and that takes a point at a distance s from the center to the point on the same ray (from the center) that is at a distance of r2/s from the center, where r is the radius of the circle. See Figure 11. We call (P,P¢) an inversive pair because (as the reader can check) they are taken to each other by the inversion. The circle G is called the circle of inversion.
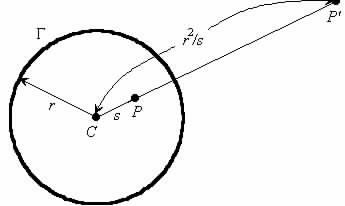
Figure 11. Inversion with respect to a circle.
Inversions have the following well-known properties (See [1], Chapter 5, and [2], Chapter 4):
 the transformation of H2 that corresponds to f. We will call f an isometry of the upper half plane model if the corresponding g is an isometry of the annular hyperbolic plane.
the transformation of H2 that corresponds to f. We will call f an isometry of the upper half plane model if the corresponding g is an isometry of the annular hyperbolic plane.
Theorem 2. Let f be the inversion in a circle whose center is on the x-axis. Then the cooresponding
 has distortion 1 at every point and is thus an isometry.
has distortion 1 at every point and is thus an isometry.
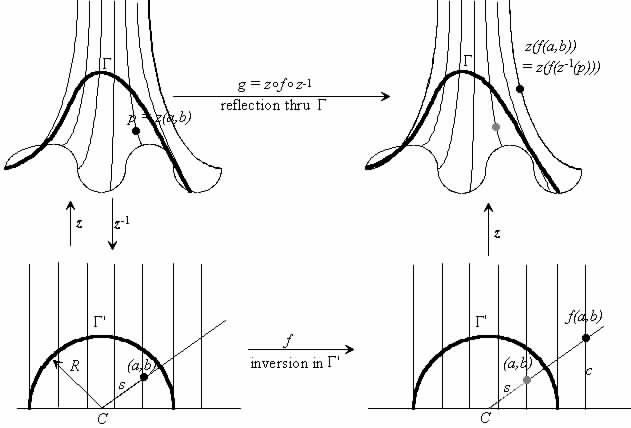
Figure 12. Hyperbolic reflections correspond to inversions.
Proof. (Refer to Figure 12.)
1. Note that each of the maps z, z-1, f are conformal and have at each point a (non-zero) distortion that is the same for all curves at that point. Using the definition of distortion, the reader can easily check that
dist(g)(p) =
 .
.
2. If z(a,b) = p, then (using (*))
dist(z-1)(p)
 b/r.
b/r.
3. Let R be the radius of the circle C which defines f and let s be the distance from the center of C to (a,b) = z-1(p). Since the inversion is conformal, the distortion is the same in all directions. Thus, we need only check the distortion along the ray from C, the center of circle, through P. Then the reader can check that this distortion
dist(f )((a,b)) = R2/s2.
One way to do this is to note that in this case the distortion is the speed (at s) of the curve
 .
.
4. By (*), dist(z)(f(z-1(p)) = r/c, where c is the y-coordinate of f(z-1(p)) = f(a,b). To determine c, look at Figure 12. By similar triangles, s/b = (R2/s)/c. Thus c = b(R2/s2) and
 .
.
5. Putting everything together, we now have:
 .
.
Since this is true at all points p, the map g must be an isometry of the annular hyperbolic plane.
We call these inversions through semicircles with center on the x-axis (or the corresponding transformations in the annular hyperbolic plane) hyperbolic reflections. Thus the images of the semicircles in the upper half plane have bilateral symmetry and thus are intrinsically straight (geodesics).
Thus, we have established that the annular hyperbolic plane is the same as the usual upper half plane model of the hyperbolic plane. The usual analysis of the hyperbolic plane can now be considered as analysis of the intrinsic geometry of the annular hyperbolic plane. We give only one example here because it results in the interesting formula pr2.
Area of Hyperbolic Triangles
Given a geodesic triangle with interior angles bi and exterior angles ai, we extend the sides of the triangle as indicated in Figure 13.
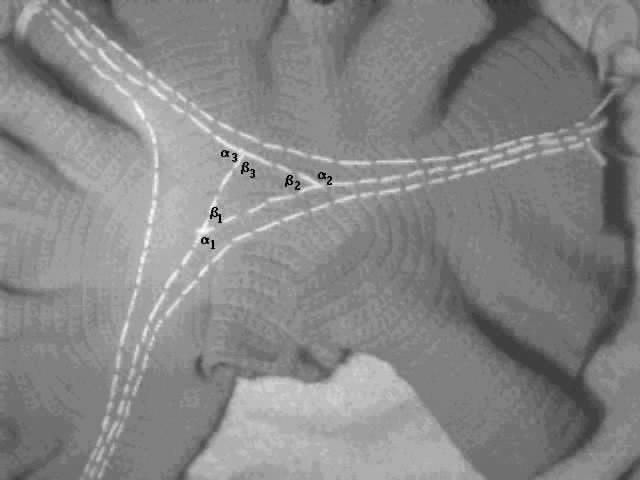
Figure 13. Triangle with an ideal triangle & three 2/3-ideal triangles.
The three extra lines are geodesics which are asymptotic at both ends to an extended side of the triangle. It is traditional to call the region enclosed by these three extra geodesics an ideal triangle. In the annular hyperbolic plane these are not actually triangles since their vertices are at infinity. In Figure 13 we see that the ideal triangle is divided into the original triangle and three "triangles" which have two of their vertices at infinity. We call a "triangle" with two vertices at infinity a 2/3-ideal triangle. You can use this decomposition to determine the area of the hyperbolic triangle. First we must determine the areas of ideal and 2/3-ideal triangles.
It is impossible to picture the whole of an ideal triangle in an annular hyperbolic plane, but it is easy to picture ideal triangles in the upper half plane model. In the upper half plane model an ideal triangle is a triangle with all three vertices either on the x-axis or at infinity. See Figure 14.
At first glance it appears that there must be many different ideal triangles; however:
Theorem 3. All ideal triangles on the same hyperbolic plane are congruent.
Proof Outline: Perform an inversion (hyperbolic reflection) that takes one the vertices (on the x-axis) to infinity and thus takes the two sides from that vertex to vertical lines. Then apply a similarity to the upper half plane taking this to the standard ideal triangle with vertices (-1,0), (0,1), and ¥. See Figure 14.
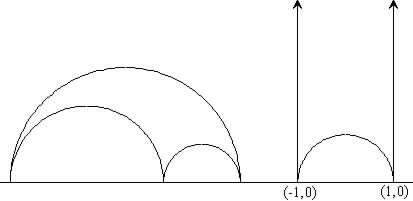
Figure 14. Ideal triangles in the upper half plane model.
We now picture in Figure 15 2/3-ideal triangles in the upper half plane model.
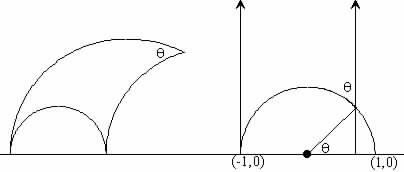
Figure 15. 2/3-ideal triangles in the upper half plane model.
Theorem 4. The area of an ideal triangle is pr2. (Remember this r is the radius of the annuli.)
Proof: By (*), the distortion dist(z)(a,b) is r/b, and thus the desired area is
 .
.
Theorem 5. All 2/3-ideal triangles with angle q are congruent and have area (p-q )r2.
Show, using inversions that all 2/3-ideal triangles with angle q are congruent to the standard one at the right of Figure 15 and thus the area is the double integral:
 .
.
Combining these three theorems and Figure 13 we get:
Theorem 6. The area of a hyperbolic triangle is
(p - Sai)r2.
References
1. Coxeter, H.S.M., and S.L. Greitzer, Geometry Revisited, New Mathematics Library 19, New York City: L.W. Singer Company, 1967.
2. Henderson, David W., Differential Geometry: A Geometric Introduction, Upper Saddle River, NJ: Prentice Hall, 1998.
3. Henderson, David W., Experiencing Geometry in Euclidean, Spherical, and Hyperbolic Spaces, Upper Saddle River, NJ: Prentice Hall, 2000.
4. Hilbert, David, "Über Flächen von konstanter gausscher Krümmung", Transactions of the A.M.S., 1901, pp. 87-99.
5. Hilbert, David, and S. Cohn-Vossen, Geometry and the Imagination, New York: Chelsea Publishing Co., 1983.
6. Kuiper, Nicolas, "On c1-isometric embeddings ii", Nederl. Akad. Wetensch. Proc. Ser. A, 1955, pp. 683-689.
7. Milnor, Tilla, "Efimov's theorem about complete immersed surfaces of negative curvature", Advances in Math., 8 (1972), pp. 474-543.
8. Osserman, Robert, Poetry of the Universe: A Mathematical Exploration of the Cosmos, New York: Anchor Books, 1995.
9. Spivak, Michael, A Comprehensive Introduction to Differential Geometry, Vol. III, Wilmington, DE: Publish or Perish Press, 1979.
10. Thurston, William, Three-Dimensional Geometry and Topology, Vol. 1, Princeton, NJ: Princeton University Press, 1997.
David W. Henderson
Department of Mathematics, Cornell University, Ithaca, NY, USA, dwh2@cornell.edu
Daina Taimiða
Faculty of Physics and Mathematics, University of Latvia, Rìga, Latvia, dtaimina@lanet.lv