Computation of Invariant Manifolds
Invariant manifolds are submanifolds of the phase
space of a dynamical system that are unions of trajetories.
Equivalently, a submanifold is invariant if the vector field of the
system is tangent to manifold. Three types of invariant manifolds
arising naturally in dynamical systems theory that have been studied
computationally are invariant tori, stable/unstable manifolds of
equilibria and periodic orbits and the slow manifolds of systems with
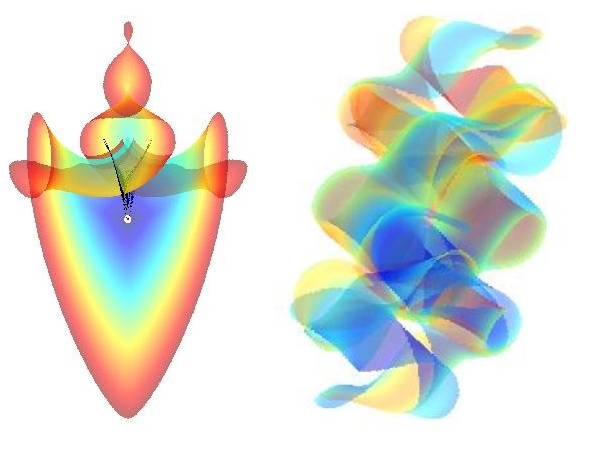
multiple time scales. Alexander Vladimirsky and I developed a new class
of algorithms for the computation of stable/unstable
manifolds of equilibria. The images below come from this work. The one
on the left is a depiction of the two dimensional stable manifold
of the origin in the Lorenz system. The paper XXX discusses several
alternative methods for computing invariant manifolds, using this
example to illustrate the output from each. The image on the
right depcits the two dimensional unstable of an equilibrium point in a
four dimensional dynamical system modeling two pendula that are coupled
by a torsional spring.