These are the two drawings I made:
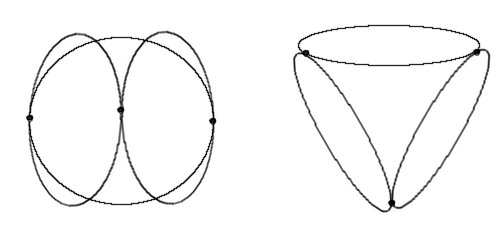
(The first is depicted in 3 dimensional space, the second in a plane)
Either is fine, since even though the linkage is in a plane, the configuration space is a space in and of itself, and cannot always exist in a plane (as was the case in the torus example).
Why are configuration spaces useful?
Real world linkages are found in all kinds of industrial engineering, as windshield wipers, as vice grips, as components of car engines and steam locomotives. Perhaps the most useful example in engineering is the robotic arm.
Of course, a robot arm will have different kinds of joints, including ball and socket joints, elbow joints, rotary joints, clamps and sliders (can you guess the motion of each of these by their names?) Still, each of these can be accounted for in a mathematical configuration space.
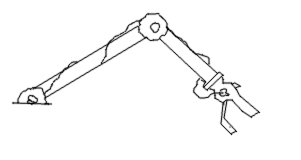
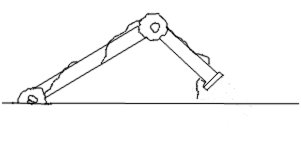
Suppose we were writing a program to operate such a robotic arm. How might we program the arm to avoid smashing into walls and busting volatile liquids? If we have a camera to work with, as an input device, we could scan the area and in our model of the arm's configuration space we could block out those configurations which collided with or intersected elements of the environment, including the arm itself. For example, look at the following robotic arm and try to tell what positions seem impossible (i.e., which positions have self-intersection or intersection with the ground).
The configuration space for a linkage with one anchor and two rods was a torus. What area of the torus do we need to block out, so that our program won't accidentally cause the arm to destroy itself?
