The mean curvature condition
in the definition of minimal surfaces has an easy
geometric implication. Since
and
, where
are
principal curvatures, the Gauss curvature of minimal surfaces must be nonpositive. Using the
definition of Gauss curvature, one can easily see that a small neighbourhood of any point
on a minimal surface cannot be a `bump', for otherwise the Gauss curvature
at
would
be positive. This agrees with our intuition that a bump can be `flattened out' to further
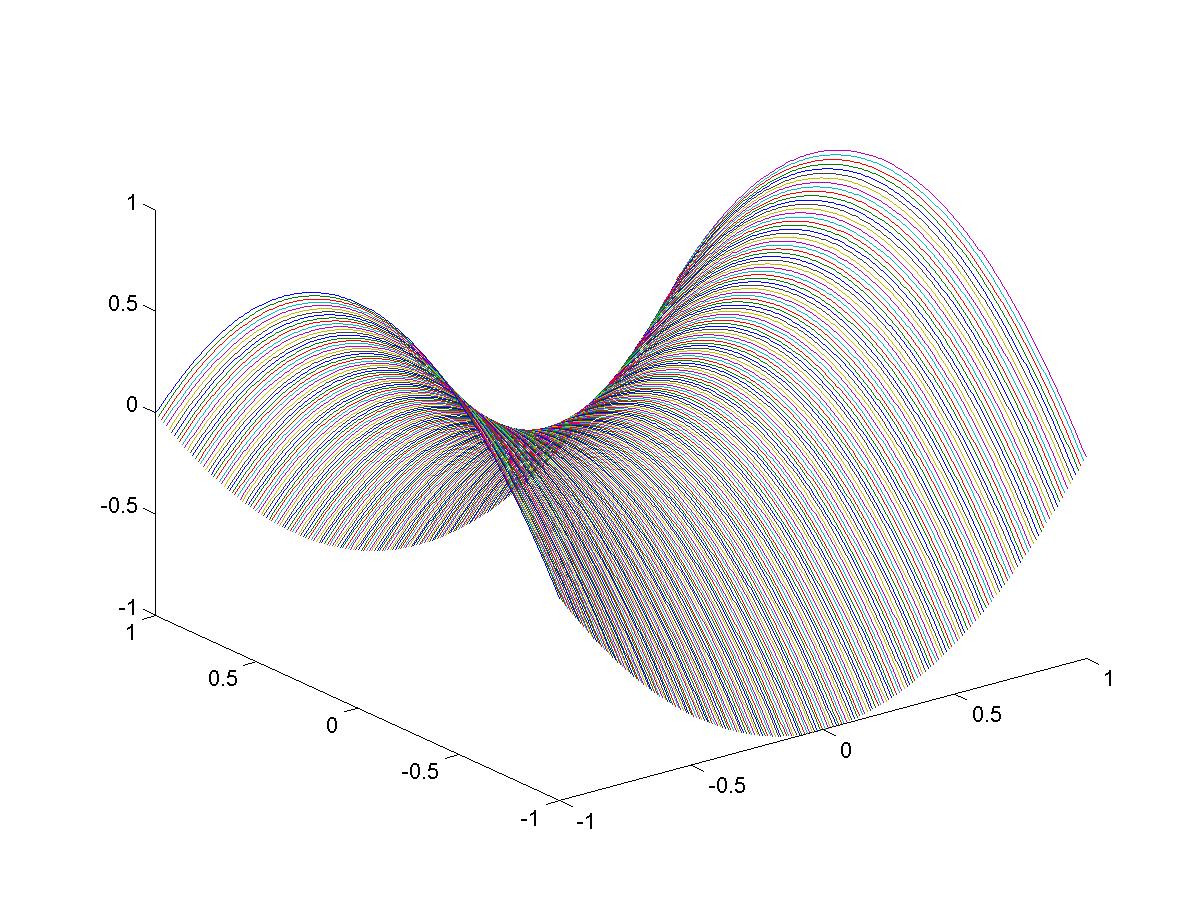
reduce the surface area. In fact, locally minimal surfaces look like a `saddle' as shown below.
In the last section, we obtained the minimal surface equation, and remarked that it is in general hard to solve. But if we impose some additional conditions on the surface, the equation can be simplified such that it is solvable by elementary means.
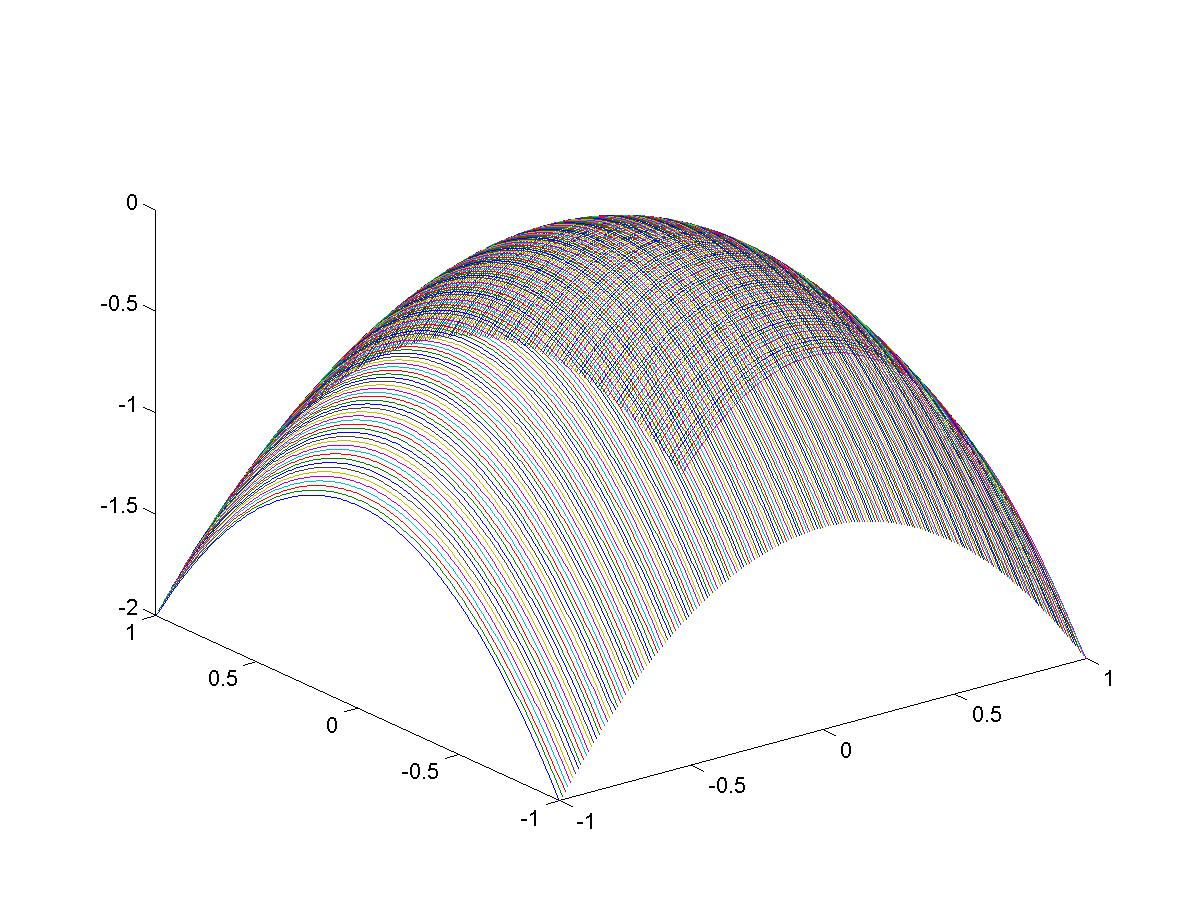
Example 4.1 Scherk's surface. If we impose the condition that the smooth function
be separated, i.e.
, then the minimal surface equation
becomes
Example 4.2 Assume that a minimal surface is a surface of revolution around the -axis. Its equation is given by
In fact, one can show that
Theorem 4.3 A surface of revolution which is also minimal is a part of either a plane or a catenoid.
Because of the mean curvature condition , there is a nice coordinate
expression for minimal surfaces if conformal parametrization is used.
Definition 4.4 is a conformal parametrization if
,
.
Theorem 4.5 Suppose
is a conformal parametrization with
. Then
Proof By assumption,
If a function satisfies
, it is called a
harmonic function.
Corollary 4.6 Let be a conformal parametrization.
is minimal iff
, i.e. the coordinate functions
,
and
are harmonic.
Example 4.7 The parametrization of catenoid given in Example 2.9 is shown to be conformal in Example 3.4. Observe that
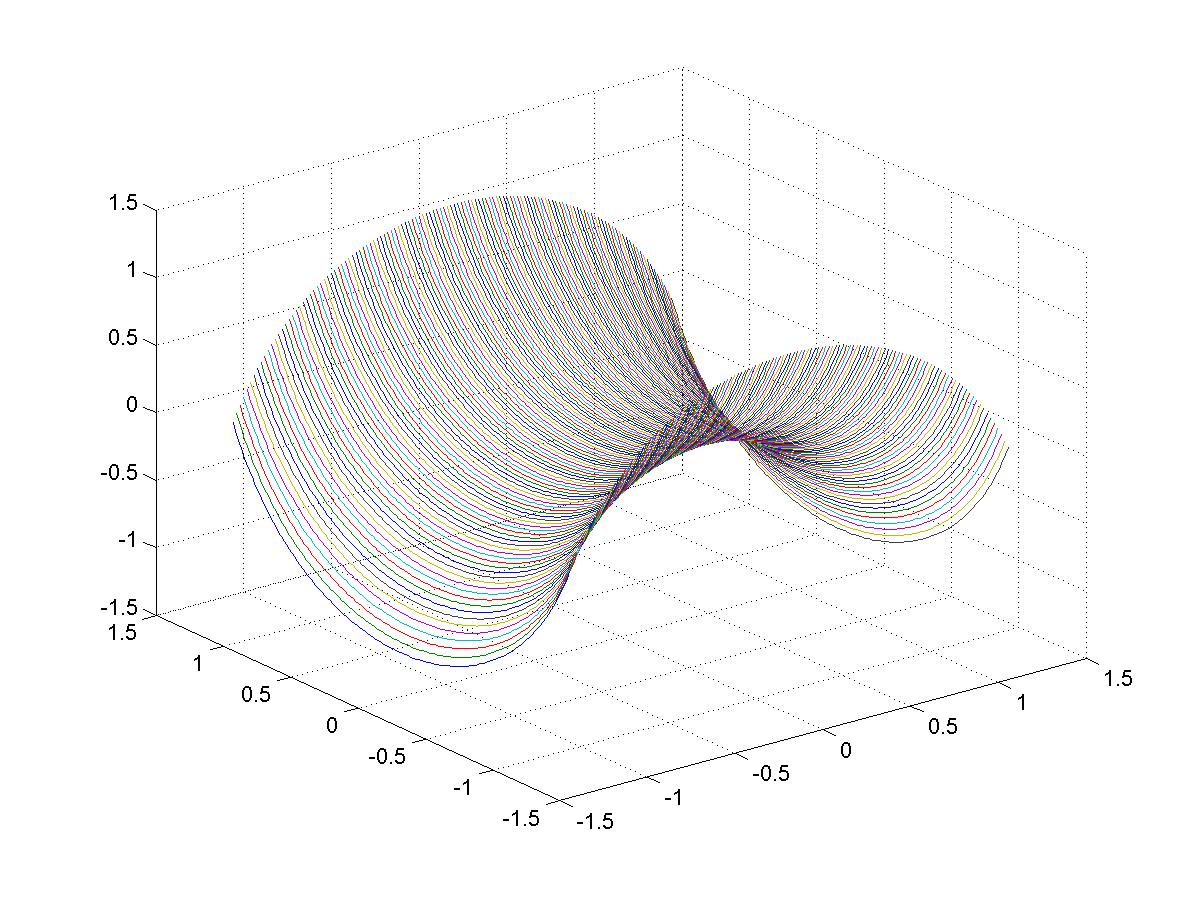
Example 4.8 The parametrization of Enneper surface given in Example 3.5 is conformal. Observe that
Exercise 4.1 Show that
is a minimal surface using Corollary 4.6. Note: This is another parametrization of helicoid.
Solution